
Key Takeaways
- Modern space telescopes depend on 6-DOF positioning systems not simply for alignment, but for maintaining optical performance throughout launch, deployment, thermal cycling, and long-term operation.
- These systems serve as critical error-budget management tools, compensating for residual misalignments, structural drift, thermal distortion, and pointing instability.
- Technologies such as hexapods, fine steering mirrors, and segmented mirror actuators enable active correction of wavefront and line-of-sight errors that cannot be eliminated through passive design alone.
- As future telescopes grow larger and more complex, 6-DOF control will become increasingly essential for achieving and sustaining diffraction-limited performance in space.
6-DOF Positioning Systems in Space Telescopes
Modern space telescopes are no longer limited by optical design alone. As aperture size increases and wavefront requirements become more stringent, the dominant challenge shifts from designing an ideal optical system to maintaining that system under launch loads, deployment uncertainty, cryogenic cooldown, thermal cycling, structural drift, and long-term orbital operation.
In this context, six-degree-of-freedom positioning systems are not merely alignment mechanisms. They are part of the telescope’s error-budget management architecture. By controlling translations and rotations of optical components, 6-DOF systems provide the final corrective layer between theoretical optical performance and actual in-orbit wavefront stability.
For space telescopes, the question is therefore not simply whether a mirror or detector can be moved in six axes. The more important question is how much residual wavefront error, line-of-sight drift, focus shift, decenter, and tilt can be compensated after manufacturing, integration, launch, deployment, and thermal distortion.
1. 6-DOF Control as an Error-Budget Management Tool
In high-performance optical systems, every subsystem contributes to the final error budget. Mirror surface figure error, mechanical tolerance, bonding stress, launch-induced deformation, deployment repeatability, thermal expansion, actuator hysteresis, and sensor noise all accumulate into residual alignment error.
A 6-DOF positioning system provides a controlled way to reduce these residuals.
Rather than treating alignment as a one-time ground-integration activity, modern space telescope architectures increasingly treat alignment as an adjustable state. This is especially important for segmented mirrors, deployable structures, off-axis systems, cryogenic telescopes, and instruments requiring long exposure stability.
Typical error contributors include:
Error Source | Optical Consequence | 6-DOF Compensation Role |
Mirror decenter | Coma, image shift, pupil misalignment | X/Y correction |
Axial displacement | Defocus, back focal length error | Z correction |
Mirror tilt | LOS error, coma, astigmatism | Pitch/Yaw correction |
Detector plane misalignment | Field-dependent focus error | Tip/tilt/Z correction |
Thermal drift | Time-varying wavefront error | Closed-loop compensation |
Deployment residual | Segment phasing/alignment error | Multi-axis correction |
Structural creep | Long-term boresight drift | Periodic recalibration |
Required performance should be specified according to the mission error budget, for example:
- Translational resolution: 2 nm / 1 μm
- Angular resolution: 0.05 μrad / 0.01 arcsec
- Repeatability: 5 nm / 0.1 μm
- Stability over temperature: 0.2 nm/°C or 0.01 μrad/°C
- First resonance frequency: ≥80 Hz
- Stroke range: ±5 mm / ±2 deg
- Operational temperature range: 20 K to 300 K
2. Why Space Telescopes Require Active 6-DOF Alignment
For ground-based optical assemblies, alignment errors can often be corrected during integration and periodically serviced. Space telescopes do not have that luxury. Once launched, the telescope must survive a sequence of events that can change its optical state:- Launch vibration and acoustic loading
- Release from launch constraints
- Deployment of mirrors, booms, baffles, or sunshields
- Cooldown to operating temperature
- Thermal cycling during orbital operation
- Long-term structural relaxation
- Reaction-wheel-induced jitter and spacecraft disturbance

3. From Kinematic Motion to Optical Consequence
For an optical engineer, the six degrees of freedom are less important as mechanical definitions than as optical error drivers. Translations and rotations map directly into wavefront and pointing errors:- X/Y decenter can introduce coma, pupil shift, field distortion, and detector registration error.
- Z displacement primarily affects focus, back focal length, and wavefront curvature.
- Pitch/Yaw errors produce line-of-sight deviation, coma, and field-dependent aberrations.
- Roll error affects detector orientation, polarization reference frames, and image registration.
4. 6-DOF Mechanisms Used in Space Telescope Architectures
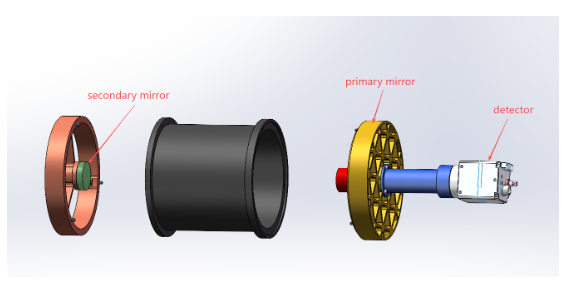
4.1 Hexapod Platforms
Hexapod mechanisms are widely used when full six-axis adjustment is required with high stiffness and deterministic kinematics. They are suitable for secondary mirror positioning, segment alignment, interferometric calibration, and optical bench adjustment.
Their main advantages are:
- Full 6-axis positioning
- High stiffness-to-mass ratio
- Compact mechanical architecture
- Good repeatability
- Compatibility with closed-loop sensing
Key specification placeholders:
- Translational stroke: ±4 mm
- Rotational stroke: ±1.5 deg
- Translational resolution: 1 nm
- Angular resolution: 0.02 μrad / 0.004 arcsec
- Repeatability: 3 nm / 0.05μm
- Axial stiffness: 1200 N/mm
- Lateral stiffness: 750 N/mm
- First natural frequency: 95 Hz
- Operating temperature: 15 K to 320 K
The critical design issue is not only positioning accuracy, but whether the platform can maintain alignment under thermal gradients, launch constraints, and structural load paths without introducing excessive parasitic motion.
4.2 Fine Steering Mirrors
Fine steering mirrors address a different part of the error budget. They are not usually intended for large-stroke alignment, but for high-bandwidth pointing stabilization and jitter suppression. They are especially relevant when residual spacecraft disturbance would otherwise degrade image quality during long exposures. Typical disturbance sources include:- Reaction wheel jitter
- Cryocooler vibration
- Solar pressure variation
- Structural micro-vibration
- Attitude-control residual error
- Angular range: ±250 μrad / ±0.25 mrad
- Angular resolution: 2 nrad / 0.002 μrad
- Bandwidth: ≥1200 Hz
- Settling time: <0.8 ms
- Mirror diameter: 60 mm
- Wavefront distortion contribution: <5 nm RMS
- Pointing stability contribution: 0.001 arcsec /1 mas
4.3 Segmented Mirror Actuation
Large deployable telescopes introduce another layer of 6-DOF complexity. Each mirror segment may require piston, tip, tilt, and sometimes additional degrees of correction to achieve phasing and global wavefront control. In this case, 6-DOF control is no longer a single mechanism problem. It becomes a distributed optical control problem involving:- Segment positioning
- Segment phasing
- Wavefront sensing
- Structural model updating
- Thermal distortion compensation
- Closed-loop optical correction
- Segment piston range: ±50 μm /0.05 mm
- Segment tip/tilt range: ±300 μrad
- Phasing accuracy: <12 nm RMS
- Wavefront sensing accuracy: <8 nm RMS
- Segment-to-segment stability: <15 nm over 24 hours
- Thermal drift allowance: 22 nm over ΔT = 10 K
5. Closed-Loop Control: Sensor, Actuator, Optical Feedback
A space-qualified 6-DOF system is only as good as its metrology and control loop. The control architecture typically combines:- Position sensors for local mechanism feedback
- Wavefront sensing for optical-state feedback
- Star trackers or guide sensors for pointing reference
- Thermal sensors for model-based compensation
- Actuators such as piezo stages, voice coils, flexure mechanisms, or motorized struts
6. Thermal Stability: The Hidden Driver of 6-DOF Design
Thermal behavior is often the dominant long-term alignment challenge. A telescope may be perfectly aligned at room temperature during ground integration, then experience significant alignment change during cooldown or orbital thermal cycling. This is especially critical for cryogenic infrared telescopes, where structural contraction and material CTE mismatch can shift optical components across multiple degrees of freedom. Important thermal design factors include:- CTE matching between mirror, mount, and actuator
- Thermal gradients across the optical bench
- Actuator performance at low temperature
- Lubrication or friction behavior under vacuum
- Sensor drift over temperature
- Thermal hysteresis after repeated cycles
- Operating temperature: 38 K
- Survival temperature: 12 K to 340 K
- Allowable thermal drift: 0.3 nm/K or 0.015 μrad/K
- Alignment stability after thermal cycle: <0.08 μm / 0.003 arcsec
- Number of qualification cycles: : ≥120 cycles
- Residual wavefront error after cooldown: <18 nm RMS
7. JWST as a Representative Case
The James Webb Space Telescope illustrates why 6-DOF control is essential in modern space optics.
JWST was launched in a folded configuration, deployed in space, cooled to cryogenic temperature, and then aligned to achieve high optical performance. This process required compensation for deployment residuals, thermal contraction, segment position errors, and wavefront phasing errors.
The key lesson is not simply that JWST used precision actuators. The key lesson is that large deployable telescopes require active alignment architectures from the beginning of the design process.
Without multi-axis adjustment capability, the telescope would need to rely entirely on passive deployment accuracy and structural stability, which is unrealistic for large-aperture space systems.
8. Design Implications for Future Space Telescopes
Future space telescopes are likely to push 6-DOF requirements even further. Larger apertures, deployable segmented mirrors, formation-flying interferometers, high-contrast imaging, and exoplanet observation all require tighter control of alignment and wavefront stability. This creates several design implications:- 6-DOF mechanisms must be included early in the optical tolerance analysis.
- Motion specifications should be derived from wavefront and LOS budgets, not selected independently.
- Thermal drift must be treated as a first-order design driver.
- Ground calibration must account for launch, deployment, and cooldown states.
- Closed-loop optical feedback will become increasingly important.
- Mechanism stiffness and dynamic behavior must be evaluated together with spacecraft disturbance spectra.
The Future of 6-DOF Positioning Systems for Active Optics and Wavefront Stability
For modern space telescopes, 6-DOF control is not simply a mechanical convenience. It is a bridge between optical design intent and in-orbit optical performance.
By compensating for manufacturing tolerances, integration residuals, deployment uncertainty, thermal deformation, structural drift, and pointing disturbance, 6-DOF positioning systems directly support wavefront stability, line-of-sight accuracy, and long-term observation reliability.
As future missions demand larger apertures, lighter structures, and tighter wavefront budgets, 6-DOF mechanisms will become increasingly central to the design, manufacturing, calibration, and operation of space telescopes.
Related Content


GREAT ARTICLE!
Share this article to gain insights from your connections!
